Traslación (geometría)
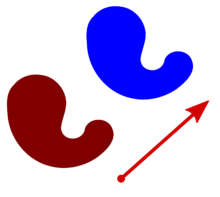
Una traslación desplaza cada punto de una figura o espacio la misma cantidad en una determinada dirección.

Una reflexión respecto un eje seguida de otra reflexión respecto a otro eje paralelo al primero es equivalente a una traslación.
En geometría, una traslación es una isometría en el espacio euclídeo caracterizada por un vector u→{displaystyle {vec {u}}}
{Tu→:Rn→RnPP′→=u→P↦P′=T(P)=P+u→{displaystyle {begin{cases}T_{vec {u}}:mathbb {R} ^{n}to mathbb {R} ^{n}&{overrightarrow {PP'}}={vec {u}}\Pmapsto P'=T(P)=P+{vec {u}}end{cases}}}

Índice
1 Definición de traslaciones
2 Representación matricial
3 Generalización
4 Véase también
Definición de traslaciones
Las traslaciones pueden entenderse como movimientos directos sin cambios de orientación, es decir, mantienen la forma y el tamaño de las figuras u objetos trasladados, a las cuales deslizan según el vector. Dado el carácter de isometría para cualquier punto P y Q se cumple la siguiente identidad entre distancias:
d(P,Q)=d(T(P),T(Q))=d(P′,Q′){displaystyle d(P,Q)=d(T(P),T(Q))=d(P',Q');}

Más aún se cumple que:
PQ→=P′Q′→{displaystyle {overrightarrow {PQ}}={overrightarrow {P'Q'}}}

Notas:
- La figura trasladada es idéntica a la figura inicial.
- La figura trasladada conserva la orientación que la figura original.
Representación matricial
Puesto que una traslación es un caso particular de transformación afín pero no una transformación lineal, generalmente se usan coordenadas homogéneas para representar la traslación mediante una matriz y poder así expresarla como una transformación lineal sobre un espacio de dimensión superior.
Así un vector tridimensional v = (vx, vy, vz) puede ser reescrito usando cuatro coordenadas homogéneas como v = (vx, vy, vz, 1). En esas condiciones una traslación puede ser representada por una matriz como:
Tv=[100vx010vy001vz0001]{displaystyle T_{mathbf {v} }={begin{bmatrix}1&0&0&v_{x}\0&1&0&v_{y}\0&0&1&v_{z}\0&0&0&1end{bmatrix}}}

Ya que como puede verse, la multiplicación de esta matriz por la representación en coordenadas homogéneas de un vector da lugar al resultado esperado:
Tvp=[100vx010vy001vz0001][pxpypz1]=[px+vxpy+vypz+vz1]=p+v.{displaystyle T_{mathbf {v} }mathbf {p} ={begin{bmatrix}1&0&0&v_{x}\0&1&0&v_{y}\0&0&1&v_{z}\0&0&0&1end{bmatrix}}{begin{bmatrix}p_{x}\p_{y}\p_{z}\1end{bmatrix}}={begin{bmatrix}p_{x}+v_{x}\p_{y}+v_{y}\p_{z}+v_{z}\1end{bmatrix}}=mathbf {p} +mathbf {v} .!}

La inversa de una matriz de traslación puede obtenerse cambiando el signo de la dirección del vector desplazamiento
Tv−1=T−v.{displaystyle T_{mathbf {v} }^{-1}=T_{-mathbf {v} }.!}

Similarmente, el producto de dos matrices de traslación viene dado por:
TuTv=Tu+v.{displaystyle T_{mathbf {u} }T_{mathbf {v} }=T_{mathbf {u} +mathbf {v} }.!}

Debido a que la suma de vectores es conmutativa, la multiplicación de matrices de traslación es también conmutativa, a diferencia de lo que sucede con matrices arbitrarias, que no necesariamente representan traslaciones.
Generalización
- El concepto de traslación también puede generalizarse a un espacio no euclídeo, concretamente puede definirse análogamente para variedades riemanninanas de curvatura constante, donde es posible definir la relación de congruencia para subvariedades de cualquier dimensión sin ambigüedad.
Véase también
- Rotación


